AVR131: Использование высокочастотной ШИМ микроконтроллеров AVR
Отличительные особенности:
- Генерация аналоговых сигналов с помощью ШИМ
- Высокочастотная масштабируемая синхронизация ШИМ
Введение
Данные "Рекомендации…" являются руководством по использованию высокочастотного широтно-импульсного модулятора (ШИМ), который присутствует в некоторых микроконтроллерах AVR. В состав "Рекомендаций…" входит пример ассемблерного кода, который демонстрирует, как использовать высокочастотный ШИМ микроконтроллера ATtiny26. Таймер с высокочастотным ШИМ также имеется в ATtiny15.
Для генерации импульсов используется режим быстрой ШИМ с переменным заполнением импульсов на выходе OC1A (PB1). Для получения из цифрового ШИМ-сигнала сигнала синусоидальной формы на выходе должен быть предусмотрен аналоговый фильтр.
Преимущества высокоскоростного ШИМ - расширение частотного диапазона аналогового выходного сигнала и возможность применения более компактных и недорогих компонентов в фильтре за счет более высокой частоты.
1. Принцип действия
ШИМ в сочетания с аналоговым фильтром может использоваться для генерации аналоговых выходных сигналов, т.е. в качестве цифро-аналогового преобразователя (ЦАП). В качестве основы используется последовательность прямоугольных импульсов с постоянным периодом следования (фиксированная частота преобразования). Для генерации различных аналоговых уровней регулируется заполнение импульсов и, таким образом, изменяется длительность импульсов. Если необходимо сформировать высокий аналоговый уровень, то длительность импульса увеличивают и наоборот.
Усреднение аналогового сигнала за один период (с помощью аналогового фильтра) позволяет сгенерировать аналоговый сигнал. При заполнении импульсов 50% аналоговый сигнал равен половине напряжения питания, а при 75%-ом заполнении импульсов - аналоговый сигнал равен 75% от напряжения питания. Примеры фильтрации выходных сигналов показаны в конце данного документа.
Например, аналоговый ФНЧ можно выполнить с помощью простого пассивного RC-фильтра. Фильтр удаляет несущую высокую частоту ШИМ и, таким образом, формирует аналоговый сигнал. Настроечная частота фильтра должна быть выбрана достаточно высокой, чтобы не исказить форму аналогового сигнала. В то же время настроечная частота должна быть достаточно низкой для минимизации пульсаций от несущей частоты ШИМ.
Рисунок 1. Низкочастотный RC-фильтр
Если аналоговый сигнал поступает к низкоомному входу, то между выходом фильтра и нагрузкой должен быть включен буферный усилитель. Это предотвращает нагружение конденсатора и появление пульсирующего напряжения.
На рисунке 2 показана реальная осциллограмма ШИМ-сигнала с переменным заполнением импульсов.
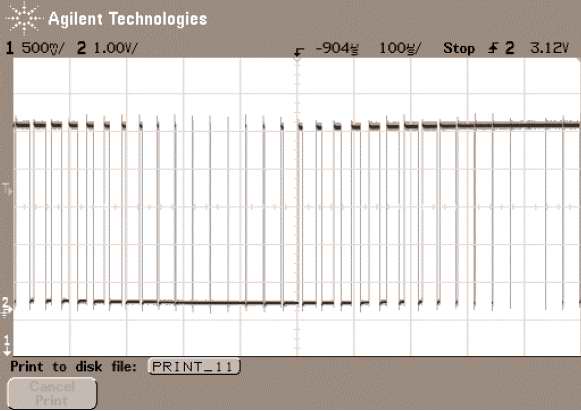
Рисунок 2. ШИМ-сигнал с переменным заполнением импульсов
В микроконтроллерах AVR для генерации ШИМ-сигналов используются таймеры-счетчики. Для изменения несущей частоты ШИМ изменяется частота синхронизации таймера и вершина счета. Повышение частоты синхронизации и/или снижение вершины счета приводят к повышению частоты переполнения таймера и, как следствие, увеличивается частота ШИМ. Максимальной разрешающей способности (вершина счета 255) соответствует максимальная частота ШИМ 250 кГц. Дальнейшее увеличение частоты ШИМ возможно путем уменьшения разрешающей способности, но в этом случае сокращается количество шагов при установке заполнения импульсов от 0 до 100%.
Изменение содержимого регистра сравнения (OCR) влияет на заполнение импульсов. Увеличение значения OCR увеличивает заполнение импульсов. До достижения счетчиком значения из регистра OCR ШИМ-выход находится в высоком состоянии, затем переходит в низкое состояние до достижения вершины счета, после чего счетчик переходит в нулевое состояние и цикл повторяется. Такой способ генерации у AVR-микроконтроллеров получил название быстрой ШИМ.
Рисунок 3. Значения счетчика и ШИМ-выход
При использовании высокочастотной ШИМ для генерации аналоговых сигналов ширина аналоговых уровней зависит от разрешающей способности ШИМ. Чем выше несущая частота, тем более просто ее подавить и тем самым минимизировать уровень пульсаций. Таким образом, необходимо оптимизировать соотношение разрешающей способности и несущей частоты.
2. Альтернативные области применения
Высокоскоростной таймер может также использоваться для генерации высокочастотных цифровых сигналов, которые в свою очередь используются для синхронизации других цифровых каскадов. При установке очень малой вершины счета можно генерировать сигналы с очень высокой частотой.
Максимальная тактовая частота таймера микроконтроллера ATtiny26 равна 64 МГц (без предварительного деления). При частоте ШИМ 16 МГц (вершина счета 3) в регистр OCR можно записать значение 0, 1 (заполнение 25%), 2 (заполнение 50%, рисунок 4а) или 3 (заполнение 100%). Этим показывается, что снижением вершины счета увеличивается несущая частота ШИМ.
Для достижения максимальной выходной частоты от таймера его необходимо перевести в режим без ШИМ. Вершина счета и содержимое OCR должны быть равны 0. Счетчик в этом случае зависает на 0. Установка действия по совпадению равным "toggle output" (инвертирование выхода) приводит к инвертированию (переключению) выхода каждый такт таймера. В результате достигается частота 32 МГц (рисунок 4б).
Рисунок 4. Высокочастотный цифровой выход
3. Пример применения
Рисунок 4 иллюстрирует, как генерировать синусоидальный сигнал из высокочастотного ШИМ-сигнала.
Программный код состоит из 3 частей: инициализация, процедура обработка прерывания по переполнению таймера 1 и цикл в режиме сна. В данном примере полагается, что микроконтроллер работает на тактовой частоте 8 МГц.
Рисунок 5. Блок-схема основного цикла программы генерации синусоидального сигнала
3.1. Инициализация
Выход компаратора таймера 1 (OC1A) необходимо настроить на вывод.
Далее выполняется установка таймера 1: подготавливается тактовый источник таймера - запускается схема ФАПЧ, которая должна войти в синхронизм (захват) с системной частотой синхронизации. ФАПЧ требует порядка 100 мс для захвата с системной синхронизацией и, поэтому, перед выполнением последующих действий необходимо подождать установку флага захвата ФАПЧ. Как только ФАПЧ захватывается его необходимо выбрать в качестве тактового источника таймера.
Далее выбирается режим ШИМ с инвертированием вывода OC1A по совпадению и устанавливается вершина счета равной 0xFF. Значение вершины счета определяет разрешающую способность и несущую частоту ШИМ- чем выше значение вершины, тем выше разрешающая способность и ниже несущая частота.
Теперь таймер готов к запуску: установка предделителя приводит к запуску таймера. В завершении разрешается прерывание по переполнению таймера.
Рисунок 6. Процедура инициализации (инициализирует вывод и таймер 1 для работы в режиме быстрой ШИМ)
3.2. Процедура обработки прерывания
Когда таймер 1 достигает значения из OCR1C (0xFF) вызывается процедура обработки прерывания по переполнению таймера. Поскольку значение OCR1C - константа, то и данное событие возникает с постоянной периодичностью. Данный период определяет несущую частоту выходного ШИМ-сигнала.
В процедуре обработки прерывания реализована таблица для генерации синусоидального сигнала. При каждом входе в процедуру увеличивается указатель для доступа к таблице, чтобы всякий раз загружались новые значения. Значение, считанное из таблицы, записывается в регистр OCR1A. Таким образом, генерируемая последовательность импульсов может быть преобразована в синусоидальный сигнал. Обратите внимание, что регистр OCR1A буферизован и что перезапись из буферного регистра в действительный регистр OCR1A происходит при переполнении таймера.
Для выполнения процедуры обработки прерывания необходимо 13 тактов. На вызов процедуры и возврат из нее также затрачивается время - всего потребуется 21 такт. Поскольку таймер 1 является 8-разрядным, то прерывание возникает каждые 256/(Частота_ШИМ/Системная_частота) тактов. В данном примере полагается тактирование внутренним RC-генератором частотой 8 МГц. Если используется максимальная тактовая частота ШИМ 64 МГц, то переполнение таймера возникает каждые 32 системных такта.
Несмотря на возможность тактироваться максимальной частотой 64МГц, в данном примере частота синхронизации таймера принята 4…16 МГц, чтобы дополнительно продемонстрировать работу с предварительным делителем.
Рисунок 7. Блок-схема процедура обработки прерывания по переполнению таймера
3.3. Холостой ход
В процессе ожидания возникновения прерывания микроконтроллер переводится в экономичный режим сна "Холостой ход" (Idle). По завершении обработки прерывания микроконтроллер возвращается в режим сна.
4. Осциллограммы
На следующих рисунках приведены осциллограммы генерации синусоидальных сигналов с помощью микроконтроллера ATtiny26. На осциллограммах представлены два сигнала: цифровой сигнал с выхода OC1A и обработанный/фильтрованный ШИМ-сигнал. Для формирования аналогового синусоидального сигнала использовался простой RC-фильтр с параметрами R = 10 кОм и C = 100 нФ, которым соответствует настроечная частота фильтра 1 кГц. Таким образом, синусоида пропускается, а высокочастотная несущая частота подавляется.
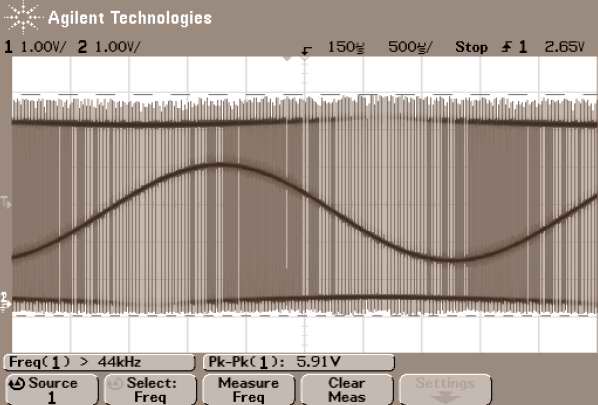
Рисунок 8. Фильтрованный и нефильтрованный выход OC1A
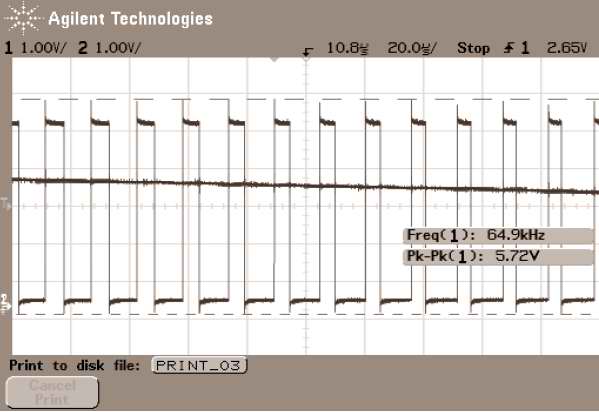
Рисунок 9. Фильтрованный и нефильтрованный выход OC1A (с большим масштабом)
Документация:
| |
 |
118 Kb Engl Исходный файл |
шкафы купе и мебель на заказ
| 

